
Technologische Innovatie in Gasleidinginspectie door lopende of rijdende Robots
Onderzoekers van Saxion en netbeheerder Alliander hebben tijdens dit project bevestigd dat het technisch haalbaar is om gasleidingen te inspecteren met behulp van robots. Het onderzoeksproject werd ingegeven door de praktische noodzaak van gasleidinginspecties. Alliander moet als netbeheerder 42.000 kilometer aan leidingen en 2,5 miljoen aansluitingen controleren op lekkages. Door het tekort aan technisch personeel is deze taak al een uitdaging, vertelt Eva Dienske, R&D Specialist bij Alliander. "De taak zal in de toekomst alleen maar groter worden door nieuwe EU-wetgeving die ons verplicht onze gasnetten vaker te controleren. We zien technologische innovatie als een hulpmiddel voor onze monteurs om dit sneller en efficiënter te kunnen doen”.
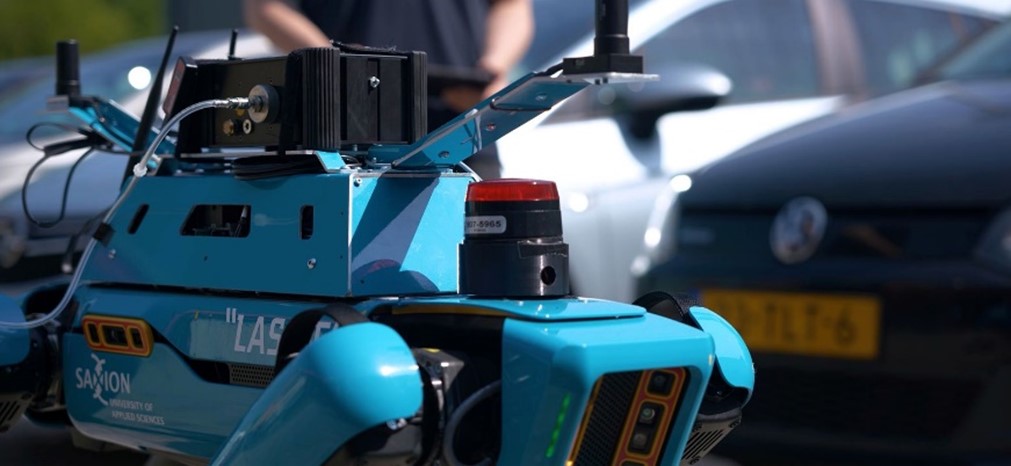
Alliander wendde zich tot Saxion met de vraag of het technologisch mogelijk is om een robot te ontwikkelen die gasleidingen kan inspecteren en gaslekken kan opsporen. Het resultaat van dit onderzoek is LASS-E, een viervoetige robot. Victor Sluiter, onderzoeker bij het lectoraat Smart Mechatronics and Robotics, licht het project toe waarin deze 'gaslekzoekhond' werd ontwikkeld.
Innovatieve Eigenschappen
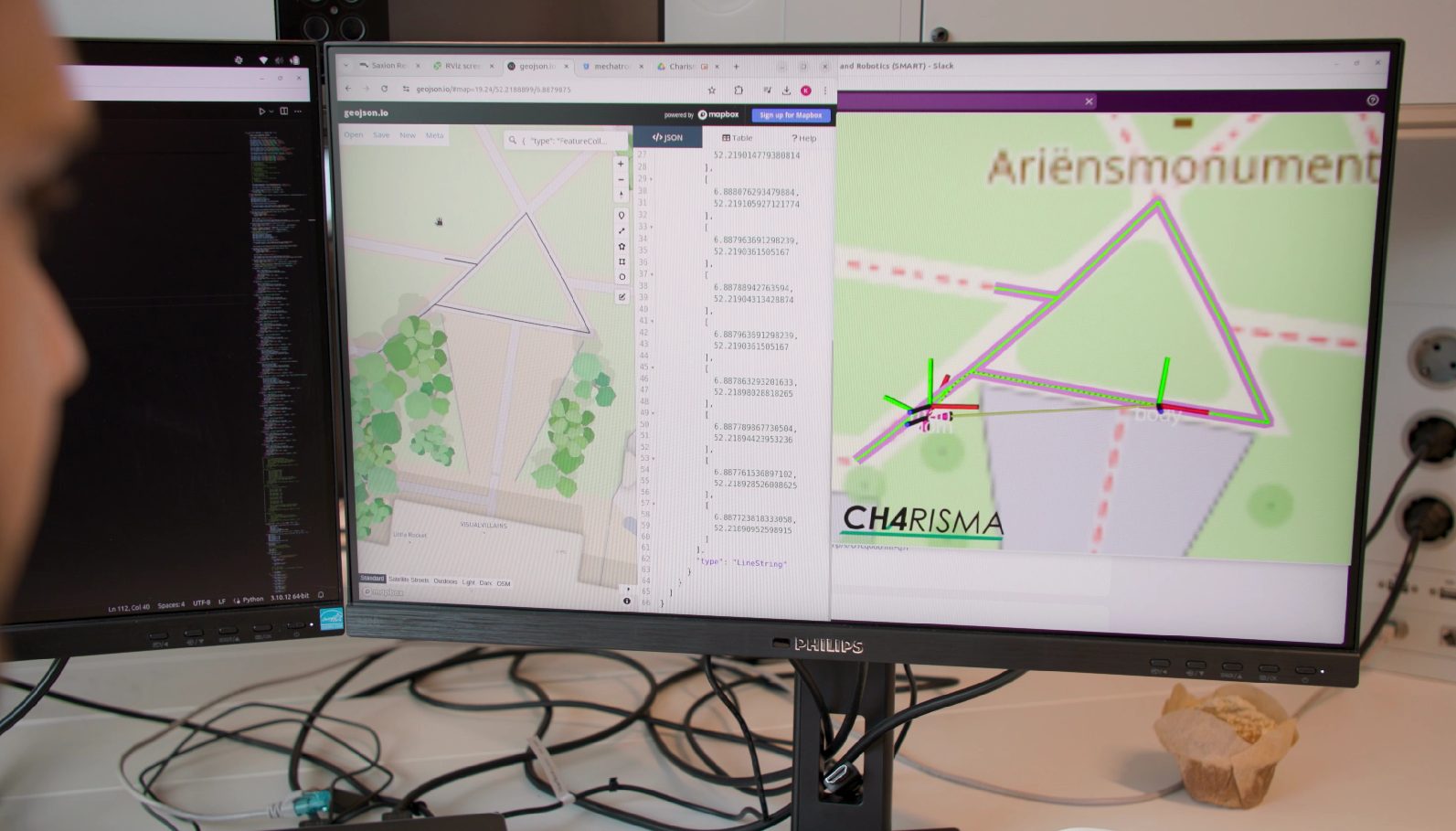
Volgens Sluiter is de robot oplossing bijzonder innovatief vanwege zijn geavanceerde navigatie- en detectiesystemen. De robot maakt gebruik van GPS om zijn locatie te bepalen en volgt een kaart van de pijpleidingen. Bij detectie van een gaslek geeft de robot een signaal door middel van een zwaailicht. Deze functionaliteit bewijst dat de meetwaarden van de gassensor geïntegreerd zijn in het navigatiesysteem. De robot kan tevens foto's maken, locaties markeren, en gegevens naar een database sturen, en kan verder speuren naar grotere gaslekken in de omgeving.
Hergebruik van Technologische Kennis
De technologie die ontwikkeld is voor de navigatie kan ook in andere sectoren worden toegepast, zoals de landbouw. De kennis uit dit project wordt hergebruikt in een project over autonome landbouw. "Nauwkeurige navigatie was essentieel in dit project, en die kennis passen we nu toe in andere projecten," aldus Sluiter. Ook in het landbouwproject werd geleerd hoe te schakelen tussen verschillende navigatiealgoritmes.
Het gebruik van open-source navigatiesoftware was cruciaal voor het project. "We hebben ook kennis teruggegeven aan de ontwikkelcommunity, zoals enkele raamwerken die voor de navigatie zijn gebruikt," zegt Sluiter. Een ander voorbeeld is de hightech rugzak die LASS-E draagt, die na ontevredenheid over het ingekochte deel zelf werd ontwikkeld en binnenkort open source beschikbaar zal zijn.
Kennisinbreng partner
Tijdens het project is er samengewerkt met de R&D afdeling van Alliander, Binnen het Research Center for Digital Technologies van Alliander houdt men zich bezig met projecten die bijdragen aan de strategische doelstellingen van Alliander. Dit roboticatraject draagt bij aan meerdere strategische doelstellingen en is met name op het netbeheer van de toekomst gericht.
Spin-offs en Toekomstige Samenwerkingen
Diverse nationale bedrijven hebben interesse getoond in de deelresultaten van dit project, en er worden gesprekken gevoerd over mogelijke spin-offs in andere toepassingsgebieden. Ook Alliander zet de samenwerking met het lectoraat voort in vervolgprojecten.
Tijdens dit project werden ook uitstapjes gemaakt naar andere onderwerpen, zoals een kabelstripper. Studenten werkten aan dit project en de resultaten zijn zo veelbelovend dat Alliander zich al heeft gecommitteerd aan een vervolgproject op dit gebied.
Projectaanpak
Het project is opgedeeld in de volgende onderdelen:
| Werkpakket | Maand | Deliverables |
| Projectmanagement
|
||
| Gasmeting en verkenning SPOT | 1 tot 6
|
Rapport over gassensoren; rapport over eerste bevindingen met SPOT en gassensor |
| Navigeer met GPS en mockup gassensor | 4 tot 8 | Test rapport over bewegingsnauwkeurigheid met / zonder payload; mockup sensorholder |
| Integreer sensing en navigatie | 8 tot 14 | Prototype dat aan te sturen is in ROS; code repository voor SPOT in NAV2 |
| Test met systeem | 14 tot 18 | Demonstratie, rapport over bruikbaarheid SPOT met gasmeting |
| Disseminatie / utilisatie | 14 tot 18 | Evaluatie en vervolg uitwerken |
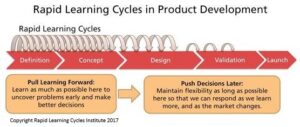
Tijdens het onderzoek werd gebruik gemaakt van de onderzoeksmethodiek Rapid learning cycle. Een methode die binnen praktijkgericht onderzoek steeds vaker wordt gebruikt maar voor de bedrijfspartner nog relatief nieuwe was. Alliander is hierdoor geïnspireerd en gaan kijken of ze deze methodiek ook kunnen inzetten binnen hun eigen R&D afdeling vaker kunnen gaan inzetten.
- Artikel Saxion en Video Saxion
- Video TechForFuture
- Alliander Robothond speurt succesvol gaslek op - Alliander
LASS-E is in mei 2024 veelvuldig in de regionale en landelijke nieuws besproken, hier een aantal voorbeelden:
- Jeugdjournaal
- Nos regio journaal
- RTV Oost Robothond gaat helpen bij het opsporen van gaslekken: "Lass-E heeft een gevoelige neus" - RTV Oost
- Telegraaf Uniek: robothond checkt alle gasleidingen op lekkage, straks ook bij u in de voortuin | Binnenland | Telegraaf.nl
- nl Netbeheerder Alliander maakt robothond die gaslekken opspoort | Tech | NU.nl
- Tubantia Deze Twentse robothond kan nu ook bij jou in de straat gaslekken opsporen (en hij is hard nodig) | Enschede | tubantia.nl
- AD Deze slimme robothond speurt een gaslek vliegensvlug op (en hij is hard nodig) | Apeldoorn | AD.nl
- De Stentor Vuurwapens gevonden na ongeval • Robothond speurt gaslek op | Home | destentor.nl
- BNR Nieuwradio
- Radio Gelderland
- POMPNL (vakmedia)
- Rockingrobots (vakmedia)
- Nationaleonderwijsgids
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}